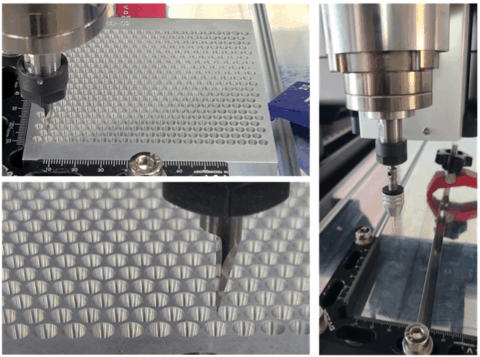
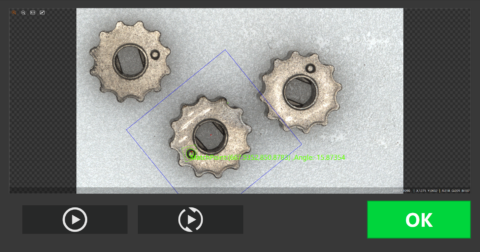
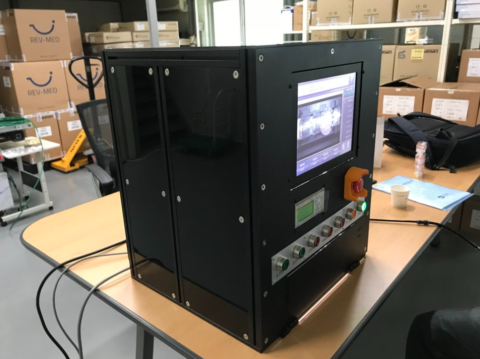
SOLUTION 스마트 팩토리(SMART FACTORY)란 무엇인가? 스마트 팩토리란 전통적인 제조 공장에 첨단 기술과 인터넷 연결성을 통합하여 생산 프로세스를 최적화하고 자동화하는 혁신적인 제조 시스템을 말합니다. 스마트 팩토리는 센서, 로봇, 인공지능, 머신비전, 딥러닝, 빅데이터 등 다양한 기술을 활용하여 관리자2년 agoKeep Reading